|
Inviwo
0.9.10.1
Inviwo documentation
|
|
Inviwo
0.9.10.1
Inviwo documentation
|
A convenience class to generate transformation matrices between the different coordinate systems in use. More...
#include <spatialdata.h>
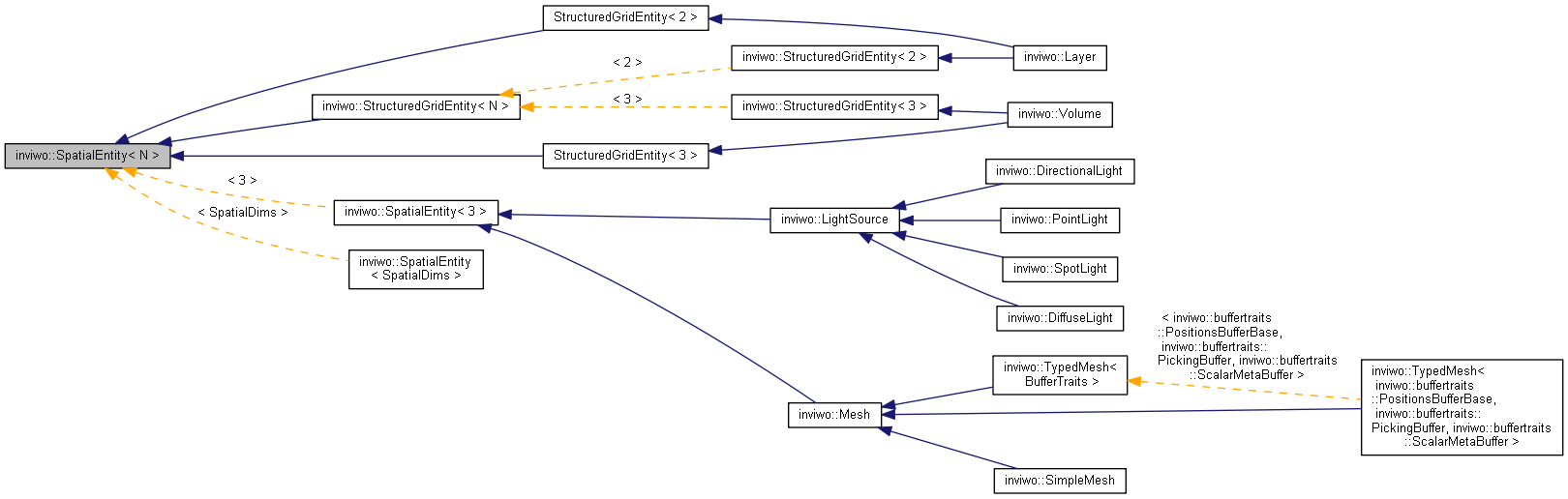
 Inheritance diagram for inviwo::SpatialEntity< N >:
Inheritance diagram for inviwo::SpatialEntity< N >:Public Member Functions | |
| SpatialEntity (const SpatialEntity< N > &rhs) | |
| SpatialEntity (const Matrix< N+1, float > &modelMatrix) | |
| SpatialEntity (const Matrix< N+1, float > &modelMatrix, const Matrix< N+1, float > &worldMatrix) | |
| SpatialEntity< N > & | operator= (const SpatialEntity< N > &that) |
| virtual SpatialEntity< N > * | clone () const =0 |
| Vector< N, float > | getOffset () const |
| void | setOffset (const Vector< N, float > &offset) |
| Matrix< N, float > | getBasis () const |
| void | setBasis (const Matrix< N, float > &basis) |
| Matrix< N+1, float > | getModelMatrix () const |
| void | setModelMatrix (const Matrix< N+1, float > &modelMatrix) |
| Matrix< N+1, float > | getWorldMatrix () const |
| void | setWorldMatrix (const Matrix< N+1, float > &worldMatrix) |
| virtual const SpatialCoordinateTransformer< N > & | getCoordinateTransformer () const |
| virtual const SpatialCameraCoordinateTransformer< N > & | getCoordinateTransformer (const CameraND< N > &camera) const |
Protected Attributes | |
| SpatialCoordinateTransformer< N > * | transformer_ |
| SpatialCameraCoordinateTransformer< N > * | cameraTransformer_ |
| Matrix< N+1, float > | modelMatrix_ |
| Matrix< N+1, float > | worldMatrix_ |
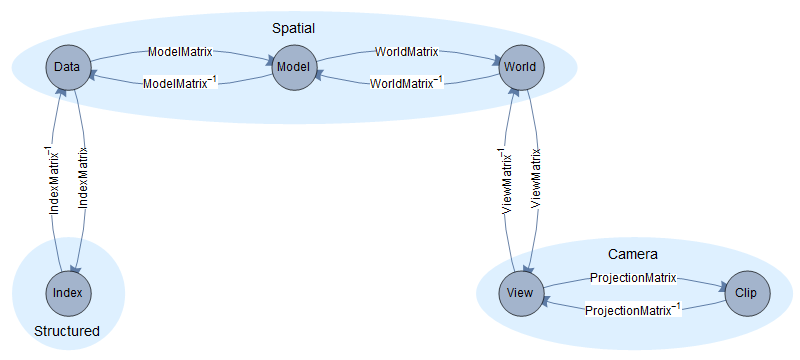
A convenience class to generate transformation matrices between the different coordinate systems in use.
This file is auto generated using tools/codegen/coordinatetransforms.nb
Data raw data numbers generally (-inf, inf), ([0,1] for textures) Model model space coordinates (data min, data max) World world space coordinates (-inf, inf) View view space coordinates (-inf, inf) Clip clip space coordinates [-1,1] Index voxel index coordinates [0, number of voxels)
Data Model ModelMatrix const SpatialEntity<N>* entity_ Model World WorldMatrix const SpatialEntity<N>* entity_ World View ViewMatrix const CameraND<N>* camera_ View Clip ProjectionMatrix const CameraND<N>* camera_ Data Index IndexMatrix const StructuredGridEntity<N>* entity_
┌───────────────────────────────────────────────────────────┐
│ Spatial │
│ ModelM. WorldM. │
│ ┌────────┐──────────▶┌────────┐───────────▶┌────────┐ │
│ │ │ │ │ │ │ │
│ │ Data │ │ Model │ │ World │ │
│ │ │ ModelM.-1 │ │ WorldM.-1 │ │ │
│ └────────┘◀──────────└────────┘◀───────────└────────┘ │
│ │ ▲ │ ▲ │
└───┼────────┼─────────────────────────────────┼───── ┼───┘
│ I │ │ V │
I │ n │ V │ i │
n │ d │ i │ e │
d │ e │ e │ w │
e │ x │ w │ M │
x │ M │ M │ - │
M │ - │ │ 1 │
│ 1 │ │ │
┌───┼────────┼────┐ ┌───┼────────┼────────────────────────────┐ │ │ │ │ │ │ │ │ │ ▼ │ │ │ ▼ │ ProjectionM │ │ ┌────────┐ │ │ ┌────────┐──────────────▶┌────────┐ │ │ │ │ │ │ │ │ │ │ │ │ │ Index │ │ │ │ View │ │ Clip │ │ │ │ │ │ │ │ │ ProjectionM-1 │ │ │ │ └────────┘ │ │ └────────┘◀──────────────└────────┘ │ │ │ │ │ │ Structured │ │ Camera │ └─────────────────┘ └─────────────────────────────────────────┘
Spatial meta data in Inviwo uses 4 different coordinate systems, they are defined as
A matrix is always stored in a 1 dim array, for example a 4x4 matrix would be: m = (1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16) in c/c++, that uses row major, that translates to a matrix like
m[0][0]=1 m[0][1]=2 m[0][2]=3 m[0][3]=4 m[1][0]=5 m[1][1]=6 m[1][2]=7 m[1][3]=8 m[2][0]=9 m[2][1]=10 m[2][2]=11 m[2][3]=12 m[3][0]=13 m[3][1]=14 m[3][2]=15 m[3][3]=16
here the first index represent the row and the second the column: m[row][column]. On the gpu, that uses column major, the same array would look like:
m[0][0]=1 m[1][0]=5 m[2][0]=9 m[3][0]=13 m[0][1]=2 m[1][1]=6 m[2][1]=10 m[3][1]=14 m[0][2]=3 m[1][2]=7 m[2][2]=11 m[3][2]=15 m[0][3]=4 m[1][3]=8 m[2][3]=12 m[3][3]=16
here the first index is the column and the second the row: m[column][row]
For example to create a translation matrix for on the gpu you want:
1 0 0 dx 0 1 0 dy 0 0 1 dz 0 0 0 1
That means that in c/c++ you would create a transposed matrix like:
1 0 0 0 0 1 0 0 0 0 1 0 dx dy dz 1
GLM also uses column major hence in glm you write m[column][row] hence you would enter the a translation like:
m[0][0]=1 m[1][0]=0 m[2][0]=0 m[3][0]=dx m[0][1]=0 m[1][1]=1 m[2][1]=0 m[3][1]=dy m[0][2]=0 m[1][2]=0 m[2][2]=1 m[3][2]=dz m[0][3]=0 m[1][3]=0 m[2][3]=0 m[3][3]=1
This means that they have the same representation as on the gpu.
 1.8.15
1.8.15